Global Site
Displaying present location in the site.
Optical Submarine Cable Network Monitoring Equipment
Vol.5, No.1 February 2010, Special Issue on Optical Submarine Cable SystemThe introduction of large-capacity wavelength-division multiplexing and OADM (Optical Add/Drop Multiplexing) technologies in optical submarine cable systems has led to an increase in the number of stations and complications in system configurations with regard to the necessity for connection management per wavelength band, etc. This trend has increased the need for submarine monitoring equipment that can control an entire network by crossing over the barriers of traditional management systems. This paper describes the requirements of operations management systems that are capable of dealing with complicated optical submarine networks together with discussion of some of NEC’s solutions.
1. Introduction
The optical submarine cable system is an advance from the traditional point-to-point or ring type systems to a mesh type network based on multipoint connections and OADM branching. In the past, the main purpose of system monitoring equipment was to manage the operation status of equipment such as the submarine terminal equipment and power feeding equipment at each station. On the other hand, with the latest optical submarine cable networks, complicated configurations have tended to increase. From the viewpoint of convenience of operation and maintenance such configurations need unified management of the networks, individual operations management for each OADM wavelength band and remote control of equipment in addition to management per station.
This paper introduces optical submarine cable network monitoring equipment that can deal with mesh type networks based on large-capacity wavelength-division multiplexing and OADM technologies. Such monitoring equipment utilizes global web technologies and is composed of the WebNSV UMS (Unified Management System) for network monitoring and the WebNSV EMS (Element Management System) for station equipment monitoring.
2. Progress in Optical Submarine Networks and Operations Management Systems
The previous mainstream transmission technology of optical submarine cable systems was waveform-division multiplexing of 10 Gbps × 64 or so waves, but the rapid dissemination of the Internet has increased the transmission capacity to 10 Gbps × 128 waves. To meet the need for transmission capacity for each landing station, the OADM technology that divides up the 128 waves into wavelengths using OADM Branching Units (BUs) is being put to practical use. Since the impact of faults is very important with such largescale systems, it is now required to improve the reliability even further and to minimize service shutdowns and recover from circuit faults as quickly as possible.
For this purpose, the network management systems need submarine monitoring equipment that can manage the entire network in addition to the traditional monitoring on a per-station basis.
3. NEC’s Optical Submarine Cable Network Operations Management Solutions
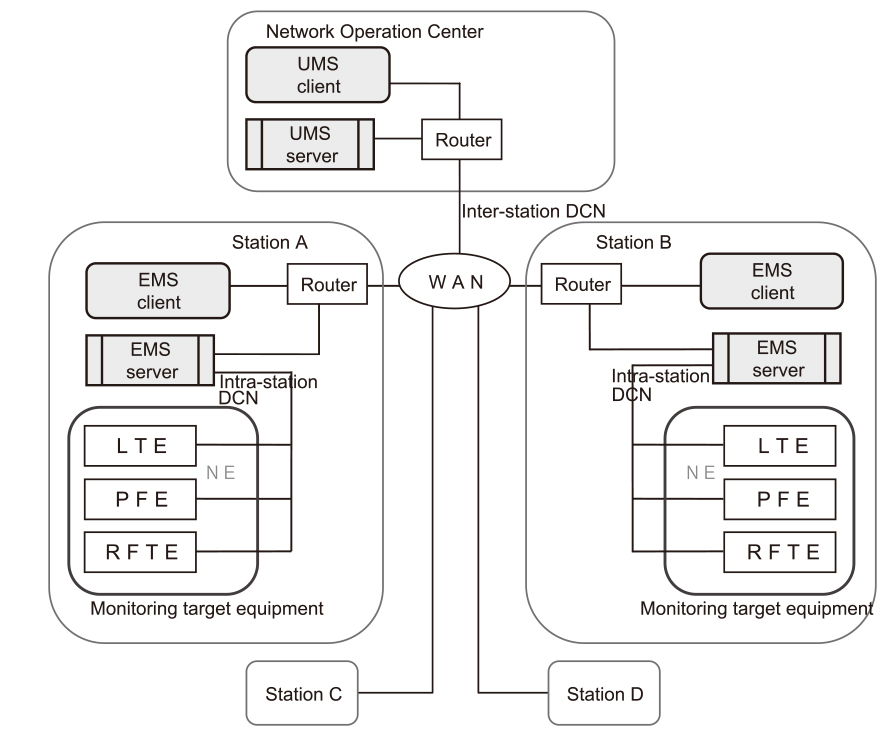
With NEC’s solutions for the operations management of optical submarine cable networks, an EMS (Element Management System) is installed at each landing station element of the optical submarine system in order to specifically monitor its equipment. Upper layer EMS monitoring equipment is additionally installed in order to monitor the entire system. Fig. 1 shows the overall configuration of this type of optical submarine cable network operations management system.
3.1 EMS (Element Monitoring Equipment)
The EMS at each landing station monitors the NEs (Network Elements) of that station including the LTE (Line Terminal Equipment), PFE (Power Feeding Equipment) and RFTE (Remote Fiber Testing Equipment). The submarine transmission path equipment such as optical submarine repeaters and submarine cables are monitored by the RFTE, which informs the EMS of the monitoring results. This procedure allows the EMS to monitor all of the optical submarine cable system elements including the submarine equipment as well as the equipment installed at each station.
The elements and EMSs are interconnected by the intra-station DCN (Data Communication Network). The EMS is composed of a server and client and runs Java programs. The server uses Linux as its OS while the client supports Microsoft Windows.
The features of the EMS are as follows.
- 1)The EMS employs a client-server configuration. This makes the client location-free so that monitoring is possible from a separate operations center, even when the landing station is unattended. It is also possible to let a single operation center monitor multiple landing stations.
- 2)The EMS takes consideration of facilitating additional equipment for wavelength extensions, which enables short term wavelength extensions according to the traffic demand at low cost.
- 3)The EMS is compatible with a large increase in capacity resulting from an increase in multiplexed wavelengths and is highly extendible for monitoring up to 1,000 NEs. The main management functions of the EMS are as follows.
(1) Fault Management
The EMS is capable of centralized in-station fault management of NEs (Network Elements). Upon receiving warning information from an NE, the EMS displays the fault location, fault level and other information on various GUI (Graphical User Interface) displays. It also informs the operator of a warning occurrence by means of a warning tone and stores the warning information in a database. The operator uses the fault management display on the EMS to show the location of each unit fault and can also show information on a specific unit fault location such as details and level of the fault. The operator can check the unit identification, fault location (rack number and card type) and fault details by controlling the mouse on the GUI. The warning display of the EMS is updated automatically and records the latest warning status permanently.
The warning tone varies according to the fault level. When faults at different levels occur simultaneously, the warning tone for the highest level is generated. The warning tone is stopped temporarily by pressing the confirmation button but it is generated again when a new fault occurs. This allows the operator to judge the fault level by simply hearing the warning tone. The operator can search and sort the fault history stored in the EMS using the period, NE type, fault level, etc. as source keys. The search results can be printed or output as electronic data for processing in another system. These features speed up and facilitate identification and isolation of fault locations by the operator and thereby facilitate maintenance procedures.
Fig. 2 shows an example of a site monitoring display. This display shows the warning levels, occurrence periods and fault locations in a tabular form and indicates the occurrence location on the GUI.
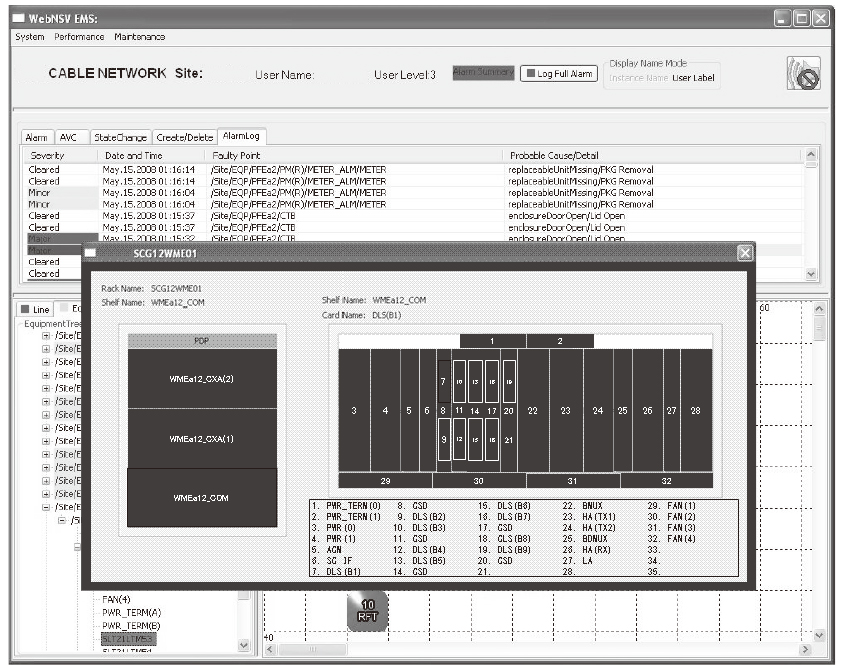
Fig. 2 Example of a site monitoring display.
(2) Performance Management
The performance information represents the quality of circuits and is extremely important for the operator. The performance information of NEs are monitored periodically as the circuit quality information of each operated circuit, and the measured results are sent to the EMS every 15 minutes as updated performance information. The EMS stores the performance information in a database. The stored performance information can be output in the form of daily, monthly or annual reports for use in improving the efficiency of the work of the operator.
Fig. 3 shows an example of a performance monitoring display. The EMS can display the performance information of a specified period in a graph or table. It can serve as information contributing to analyses of long-term stability and confirmation of presence/absence of degradation of the circuit quality in the submarine sections.
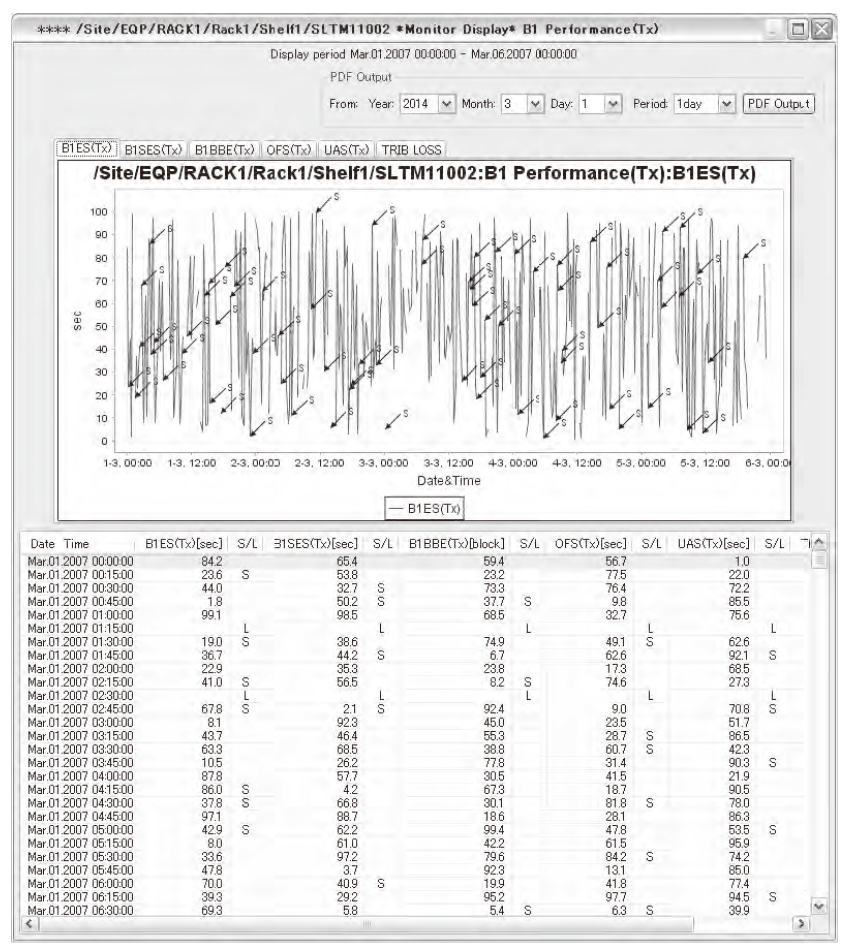
Fig. 3 Example of a performance monitoring display.
3.2 UMS (Unified Management System)
The UMS is connected to the EMSs installed in the landing stations of optical submarine cable systems for monitoring the entire optical submarine cable system. The application of this system makes possible the control involving multiple landing stations, such as the per-wavelength management of OADM BUs and the switching of power feed paths, as well as the monitoring of faults over the entire system. The UMS is installed at a landing station or at the network operations center as an extension of the inter-station DCN.
The EMS and UMS are connected via the inter-station DCN using TCP/IP. The UMS also adopts a server/client configuration as do the EMS and runs Java programs. The server uses Linux as the OS while the client’s OS supports Microsoft Windows.
(1) Fault Management
The UMS collects fault information from all of the EMSs installed in the landing stations and displays it as the system warning information.
This facility particularly supports the functions of the operations center that supervises the entire optical submarine cable network.
If a fault occurs within the system, the fault position is displayed on a map as shown in the example of a UMS network display in Fig. 4 .
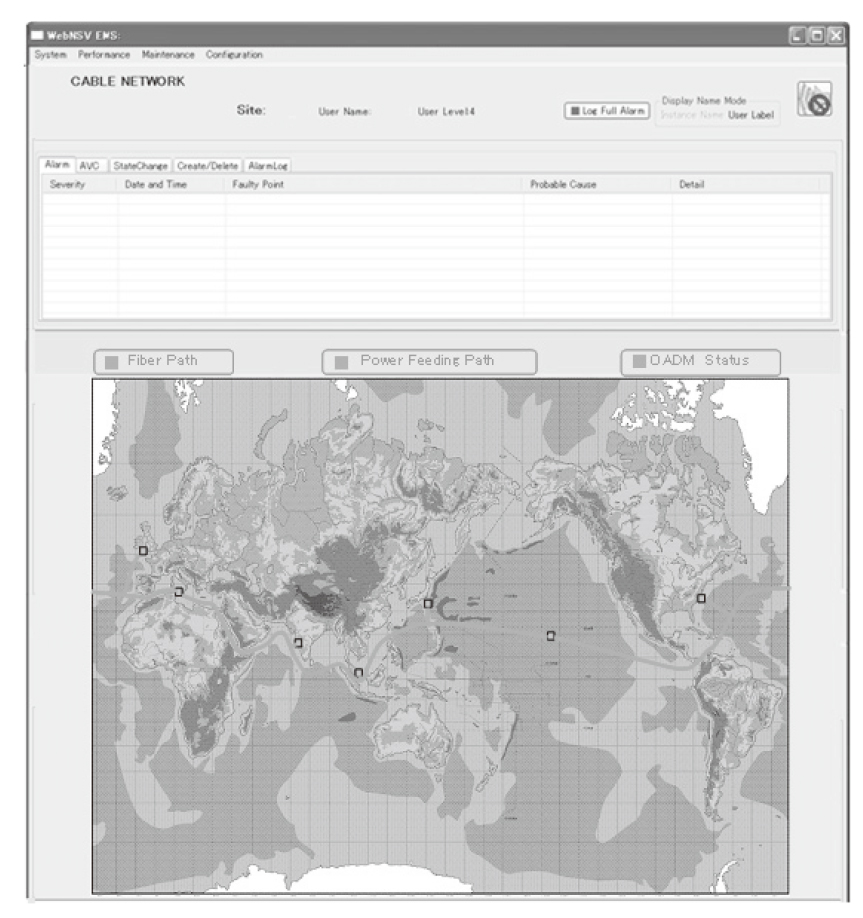
Fig. 4 Example of a network display.
The UMS screen displays a table listing the warning levels, occurrence periods and fault locations together with a cable network diagram in which the fault locations are represented by using different colors for the landing stations and cables. This screen allows the operator to confirm the faultoccurrence station within the system, at a glance. By controlling one of the station building symbols in the display it is switched seamlessly to the site monitoring display of the EMS of the station. This feature makes it possible to check a faulty station, NE and card and the type of fault while moving seamlessly between the UMS and EMS displays. This improvement in both the operability and visibility allows the operator to quickly identify the fault locations.
(2) OADM Management
Network configuration with the OADM (Optical Add/Drop Multiplexing) function, which enables low-cost, efficient networking by allowing the optical fiber pairs to be shared by three or more landing stations, has recently been put to practical use. With the OADM configuration, the BUs with an OADM function are installed on the seabed and only the signals of the required wavelength bands are branched to the intermediate stations. Nevertheless, since the branches and trunk’s of the OADM BU systems share the optical amplification wavelength bands, the transmission quality tends to deteriorate somewhat, e.g. if the trunk signal level is altered due to a disconnection of a branch cable. To prevent such a phenomenon in case a branch optical signal fails, it is necessary to optimize the overall signal level by controlling the level adjustment light provided in the LTE. By using the LOW (Loss of Wavelength) warning information as the trigger for a level adjustment the UMS works together with the EMS to maintain a normal trunk signal quality and automatically adjusts the level adjustment light of the LTE.
Fig. 5 shows an example of the Fiber Path View display, which provides a graphical display of the status of the fiber pairs in the cable.
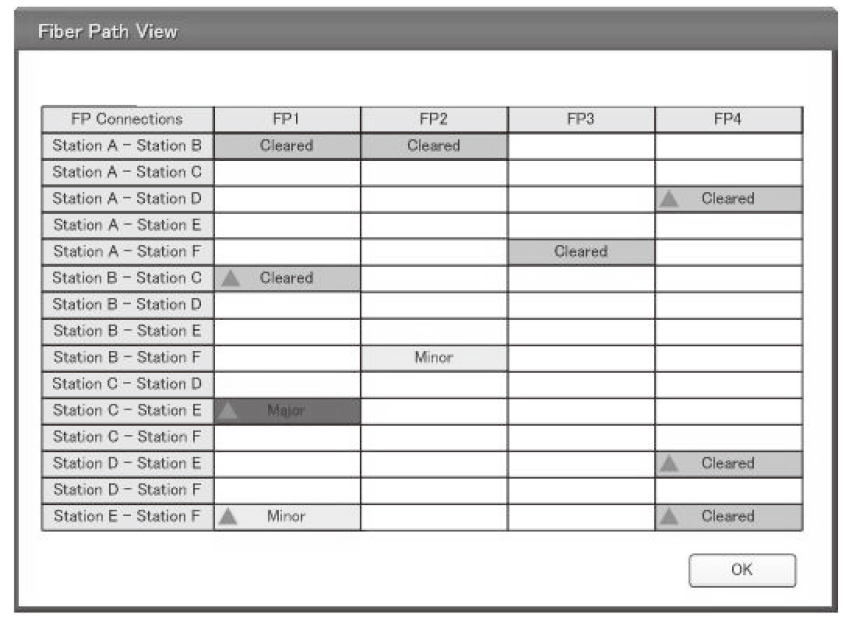
Fig. 5 Example of a fiber path view display.
Fig. 6 shows an example of an Optical Path View display, which provides a graphical display of the logical connections and status of the optical signals in the fiber pairs.
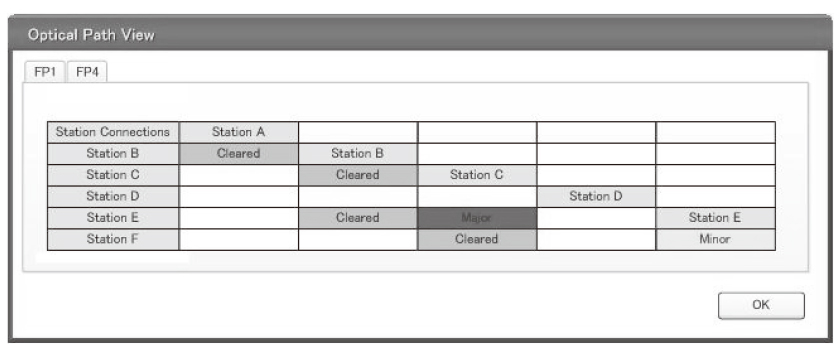
Fig. 6 Example of an optical path view display.
(3) Power Feed Switching Management
The purpose of power feed switching is to maintain a power feed to the optical submarine cable while controlling the circuitry in a BU, even in a case when the power feeding to a repeater becomes impossible due to cable damage, etc. In Fig. 7 , power is fed from station A to station B via a BU and the power to the station CU is connected to the sea GND (earth) at the BU. In case the power feed to the BU is shut down due to damage to the cable between station B and the BU, e.g., the circuitry in the BU is switched to form a power feed path from station A ― BU ― station C in order to continue power feeding to the optical submarine repeater as shown in Fig. 8 .
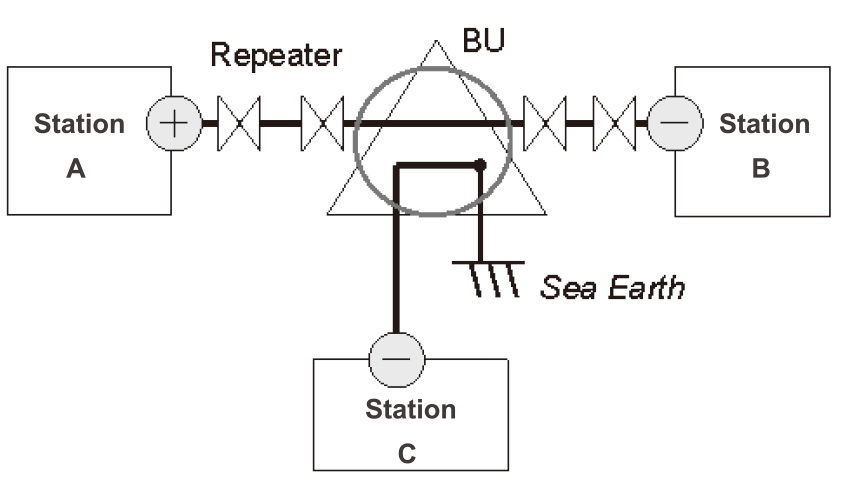
Fig. 7 Power feed path configuration before switching.
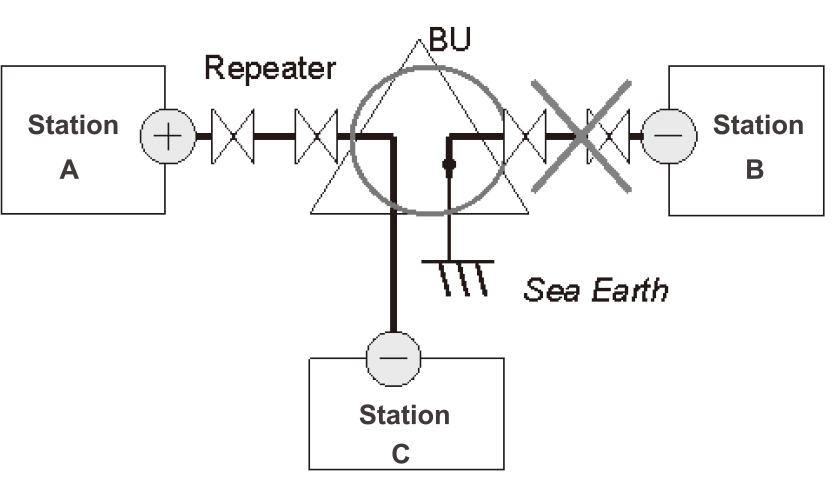
Fig. 8 Power feed path configuration after switching.
Fig. 9 shows an example of the Power Feed Path View display, which provides a display of the power feed status of the BUs and enables control of the power feed path switching.
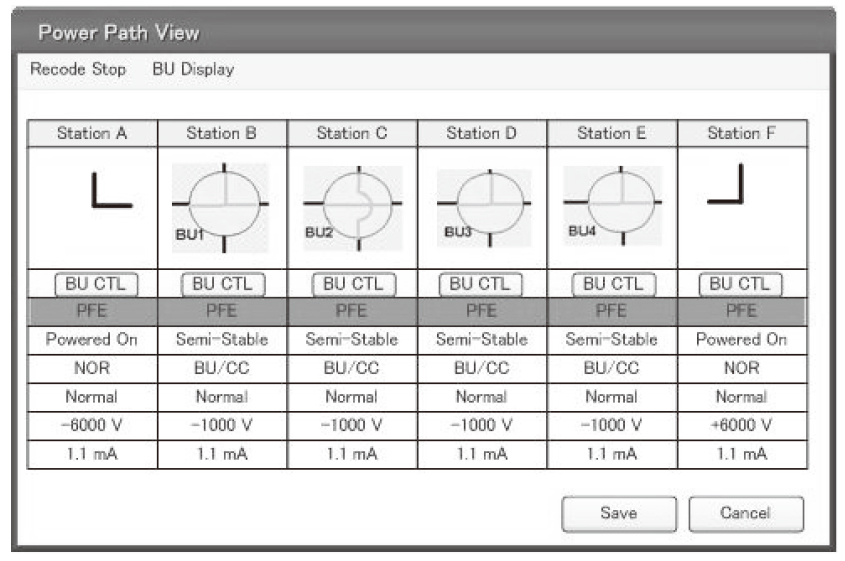
Fig. 9 Example of a power feed path view display.
(4) Interfacing with the Upper-level OSS/NMS
One of the network management solutions is connection to an existing upper-layer OSS (Operation Support System) or an NMS (Network Management System). To make this possible, the UMS is equipped with an interface for use in communications with the upper-layer OSS/NMS.
(5) User Management
The user management consists of management by defining the level of a user. The user level is defined for each user and the menus displayed for the user are selected according to the user level. The UMS and EMS are also connected seamlessly according to the user level in order to enable controls according to a specific user level. This procedure makes possible the provision of functions in a high operability environment in accordance with specific user levels and security measures.
4. Conclusion
In the above, we introduced system monitoring equipment for mesh type optical submarine cable networks that are based on large-capacity wavelength-division and OADM technologies. This monitoring equipment is capable of the unified management of an optical submarine network, thereby reducing the burden on the operators at the same time as improving the convenience of both operation and maintenance. In the future, we intend to further improve our submarine monitoring equipment solutions in order to deal with ongoing systems advancements.
Authors’ Profiles
NOMURA Kenichi
Manager
Submarine Network Division
Broadband Networks Operations Unit
NEC Corporation
Manager
Submarine Network Division
Broadband Networks Operations Unit
NEC Corporation
TAKEDA Takaaki
Manager
2nd System Solutions Division
NEC Engineering, Ltd.
Manager
2nd System Solutions Division
NEC Engineering, Ltd.