Global Site
Displaying present location in the site.
Manipulating the Underwater Propagation Path of Sound Waves with Variable Depth Sonar
Sensing Technologies Underlying Social Systems: Sensing Technologies That Work Behind the Scenes PDF
PDFFor more than 90 years, NEC Corporation has been developing sonar sensors for detecting submarines that threaten Japanese territorial waters. Recently, the quieting performance of submarines has improved dramatically, triggering the need for new sonar technology to counteract this improved performance. In response to this need, NEC has developed the “Variable Depth Sonar” system that manipulates the propagation path of sound waves to search for submarines. Although we encountered many difficulties during the development of this technology, we overcame them and succeeded in achieving results in practical testing in the sea that exceeded our expectations. This paper provides an overview of the development process of the technology.
1. Introduction
Japan is one of the leading maritime nations in the world. Surrounded on all sides by water, this island country is highly dependent on the sea with marine transportation serving an integral part of conducting trade with other countries. For this reason, it is extremely important to ensure security measures to defend against the various maritime threats that have intensified in recent years.
An example of a typical threat is a submarine of unknown nationality violating Japanese territorial waters. Although surface ships and aircrafts can be detected using sensors that use light and radio waves, it is difficult to apply this technique to submarines as light and radio waves cannot travel underwater. Therefore, sonar using sound waves that propagate well in water is commonly used as a sensor for finding submarines.
NEC has been engaged in research and development of sonar from the period of the pre-war former Japanese Navy to the present-day Japan Maritime Self-Defense Force. With the year 2021 marking the company’s 90th year in business as a sonar system manufacturer, NEC has a long history of contributing to national security projects and to the realization of a safe and secure society through innovations within the field of underwater defense.
2. Sonar
There are two types of sonar – passive and active. Passive sonar receives sound waves generated by the target, whereas active sonar emits pulses of sound waves that reflect off the target and returns through an echo. Each are used according to the intended purpose.
Fig. 1 shows the schematic principle of sonar using a submarine as an example target. The “passive sonar” receives characteristic sounds such as noise emitted by the submarine itself with two or more receivers, and can estimate the direction of the submarine from the phase difference among received signals. The “active sonar” can estimate the distance to the submarine by transmitting sound waves by itself, receiving reflective sound from the submarine, and measuring the sound wave propagation time from transmission to reception. The “active sonar” can also obtain the direction in the same way as the passive sonar so it can identify the location of submarine based on the distance and direction.
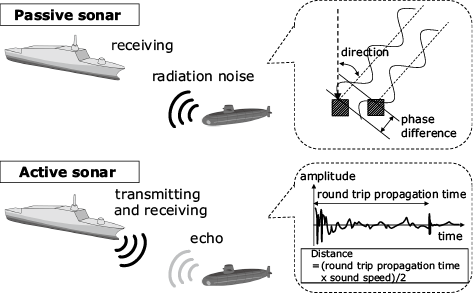
Through the processes described above, sonar can be used to detect submarines lurking at tens of kilometers away, and in some cases even more than 100 kilometers away, depending on sea conditions.
However, due to various factors, it is not easy to determine the exact location of a submarine.
The prime factor is that the ocean is filled with various kinds of noise, from the sounds of crustal movement and volcanic activity to the sound of rain hitting the sea surface and the calls of marine life. To pick out the sound of the submarine against the surrounding background requires advanced signal detection technology.
The second factor has to do with the nature of sound waves. Since sound waves are much slower than light and radio waves, information from sound waves is a few seconds or tens of seconds old. In addition, as discussed in detail later, sound waves are bent rather than straight when propagated in water, so this refraction must be taken into account when searching for a submarine. Furthermore, since this characteristic is influenced by the sea water temperature, the propagation situation changes constantly, making the search for submarines difficult.
The quintessence of sonar is finding submarines hiding in this world “where light cannot reach and is never visible to the eyes” and “which is unknown although it is closer than space”. For members of the Japanese Self-Defense Forces (JSDF) who are defending the safety of Japan on the frontlines, the sonar is their only eye and serves as a lifeline for dealing with underwater threats such as submarines. Since it is essential to first detect submarines for national defense, and system halts threaten JSDF members’ lives, NEC’s mission as a sonar system manufacturer is to build such mission-critical systems.
3. History of Surface Ship Sonar Systems
The stealth capabilities of submarines have also been improving year by year, enabling them to escape detection by sonar. In particular, the drastic improvement in the quieting technology in recent years has made it more difficult than ever to search for submarines. To counteract the improvements in submarine performance, NEC worked in collaboration with the Ministry of Defense and the Acquisition, Technology and Logistics Agency to develop the following two innovative technologies to further enhance the sonar systems on surface ships.
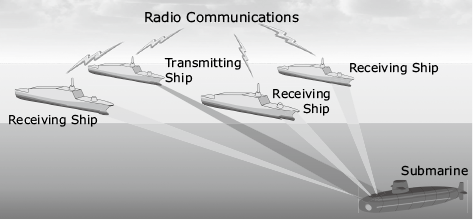
The first technology is called the multi-static sonar, the image of which is shown in Fig. 2. Previously, submarine search was done from a single surface ship, but the multi-static sonar allows multiple vessels to share data in real time while the transmitting and receiving vessels work together to conduct a search. The technology expands the search range compared to the use of a single sonar, and also improves the chances and accuracy of submarine detection by integrating the target information of each vessel. In addition to collaboration between surface ship sonars, collaboration with sonar dropped from aircraft has been developed, increasing expectations for further improved capabilities.
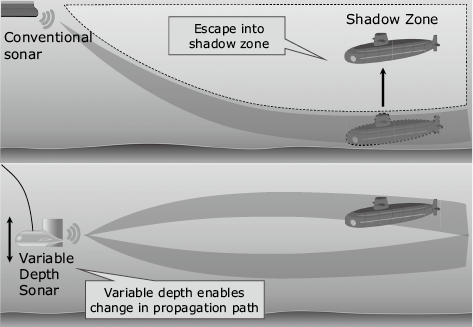
The second technology is the variable-depth sonar, which is the focus of this paper. Fig. 3 shows the schematic principle of this technology. As mentioned above, underwater sound waves are bent rather than straight when propagated in water due to widespread changes in refraction index caused by the variation in water temperature depending on depth. This leads to the formation of an area called the “shadow zone,” which cannot be reached by sound waves transmitted from near the sea surface, as in the case of a sonar fixed to the hull of a conventional surface ship. It is generally believed that submarines will try to escape into this shadow zone when they recognize the sound of a surface ship’s sonar. To counteract this, the variable depth sonar is not fixed to the hull, but suspended via a cable to change the depth and the vertical propagation path of the sound waves to keep the submarine from escaping.
The variable depth sonar, however, has several drawbacks, one of which is its heavy load weighing several tons, whereas that needs to be maneuvered from a surface ship navigating at a high speed in rough waters. Also, in addition to the requirements of a conventional sonar, the variable depth sonar requires a sensor with high water pressure resistance, a towfish with excellent attitude stability, a cable with high tensile strength and large power transmission, and a hoisting device for supporting them. With the growing interest by users in recent years to address the issue of the shadow zone, however, NEC decided to take on the challenge of developing Japan’s first variable depth sonar system in collaboration with manufacturers that possess the respective elemental technologies.
4. Variable Depth Sonar System
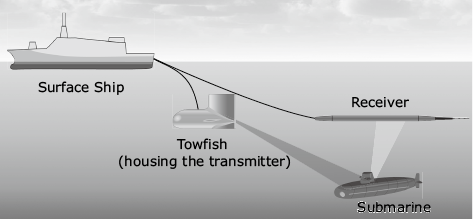
Fig. 4 shows the overall image of the variable depth sonar system. The depths of the transmitter and receiver can be varied independently by changing the velocity of the surface ship and the lengths of the respective cables.
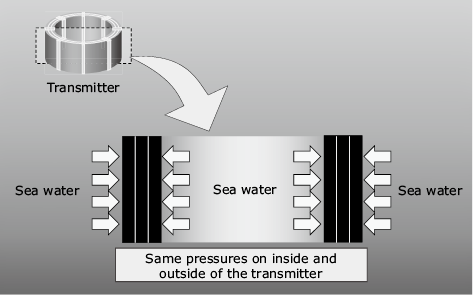
The transmitter is suspended deep underwater so it needs to be able to withstand high water pressure. With the sonar system, performance is directly connected to the output of the sound wave. Though increasing the transmitter size enables high power, due to the limited space on board a surface ship, it is necessary to reduce the size of the transmitter while maintaining the required performance. NEC met these requirements for the present system by developing a free flooded ring design formed by dividing and stacking structures. The free flooded ring design refers to a cylindrical shape as shown in Fig. 5. Because water enters inside the transmitter, the pressure on the inner and outer surfaces of the transmitter become almost equal, thus minimizing performance changes due to water pressure. The split and stacked structure contributes to increasing the efficiency of vibrations.
The shape of the towfish, which houses the transmitters, was determined through numerical simulations and fluid experiments with models considering actual environments to ensure that it would not lose its posture even when sailing at high sea in rough seas, while also maintaining the space and strength required for installation on a surface ship.
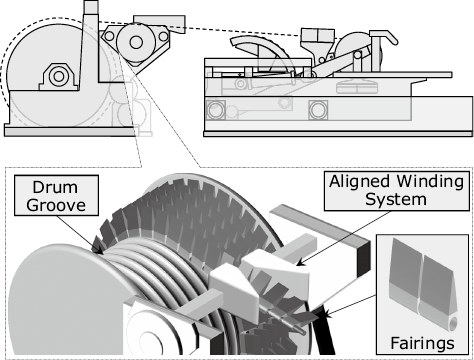
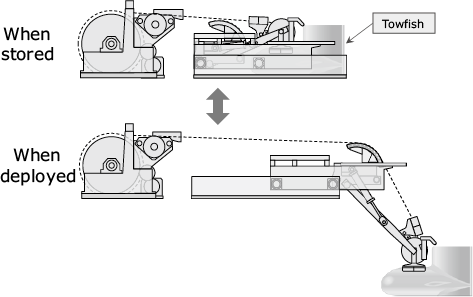
Fig. 6 shows an image of the hoisting device for the sound source. The towing cable has fairings attached to it to reduce fluid resistance but the fairings may point in various directions due to disturbances in the sea, and if the cable is wound up in the hoisting device as is, they will overlap each other and damage the cable. Therefore, as shown in the lower part of Fig. 6, we installed a mechanism to wind all the fairings in the same direction (aligned winding system), and installed a groove in the drum for the towfish cable to fit into. This eliminates the interference with the winder and the overlapping of the fairings, and allows the cable to be wound and unwound as many times as needed. In addition, as shown in Fig. 7, we have adopted a sliding structure that can be stored in a limited space when stowed and deployed to a position where the towfish can be suspended. Furthermore, when lifting and lowering the towfish, the tip of the hoisting device lands on the surface of the sea, making it possible to stably lift and lower the towfish even in rough marine environments where ships are exposed to waves.
To obtain the target bearings more accurately, it is desirable to have more elements lined up in a higher density. However, this higher density also increases the number of wires and electronic circuits inside the cable, resulting in an outer diameter which cannot be accommodated due to the limited space aboard the surface ship. This problem was solved by using optical fiber elements to reduce the number of electronic circuits and thereby reduce the outer diameter, resulting in a form that can be mounted on the surface ship while maintaining the performance.
Since all of these technological elements are new to us, we started by devising a simulation model that had never been used before, and spent several years conducting repeated simulations and testing prototypes for each element. We experienced many costly failures along the way, for instance, a devised technique not being ineffective on the actual sea surface even though it worked well in the simulation; a functional shutdown caused by higher heat generation than estimated; and damaging the prototype due to unexpected stress. After much trial and error, we were able to come up with a solution that satisfied all the requirements.
5. Conclusion
The development of the variable depth sonar was a large-scale project involving many Japanese manufacturers with leading technological capabilities, and as a prime manufacturer, NEC made every effort to make this development a success. The process was not all smooth sailing, and as mentioned above, we encountered many difficulties, but we forged ahead with commitment to building on our long and proud history of developing reliable sonar systems and contributing to underwater defense in Japan. As a result, in the sea trials conducted in 2020 with the prototype installed on a test vessel, the system demonstrated capabilities beyond expectations, such as detecting submarines at a long distance that cannot be accomplished with conventional surface ship sonar. Following these remarkable results that are on par with products of leading manufacturers overseas, the Ministry of Defense has decided that this system will be installed on the most advanced ships with the expectation that it will enable them to gain an advantage in underwater defense as an ace in the hole in the next term.
NEC will continue to support customers by striving to ensure that the system continues to demonstrate its high capabilities in actual operations without being satisfied with this result. In addition, we will continue to contribute to the safety and security of Japan and the world by developing further technologies utilizing this system, devising new systems based on our accumulated knowhow, and proposing new ways to use them.
In closing, NEC would like to express our deep gratitude to the Ministry of Defense and the Acquisition, Technology and Logistics Agency for their kind guidance as well as to the manufacturers for their efforts in making this development a success.
Authors’ Profiles
HIMENO Masahiro
Assistant Manager
Radio Application, Guidance and Electro-Optics Division
Assistant Manager
Radio Application, Guidance and Electro-Optics Division
KOMORIYA Kazutaka
Assistant Manager
Radio Application, Guidance and Electro-Optics Division
Assistant Manager
Radio Application, Guidance and Electro-Optics Division
ARAYA Hitoshi
Manager
Radio Application, Guidance and Electro-Optics Division
Manager
Radio Application, Guidance and Electro-Optics Division
SHIBA Hisashi
Senior Manager
Radio Application, Guidance and Electro-Optics Division
Senior Manager
Radio Application, Guidance and Electro-Optics Division
