Global Site
Breadcrumb navigation
Control AI
AI TechnologiesJune 30, 2022
Creating a Society with Automation in Which Working People Do Not Overwork Themselves
The goal of NEC's Control AI research is the realization of a "society in which working people do not overwork themselves." The target is to alleviate dangerous work and complex tasks through mechanization and automation to create an environment in which we humans can work safely and comfortably. However, this is not about switching all tasks from people to machines. Machines essentially become good collaborators that support human work and decisions so that people can lead more efficient and abundant lives. We continue to visualize and research such a society.
Based on such a vision, NEC is focusing on technologies in this area that can simplify instructions to robots. We are advancing the research of technologies that can eliminate the long hours spent by engineers to configure detailed instructions and programming and realize a world in which "robots can be immediately introduced and put to use."
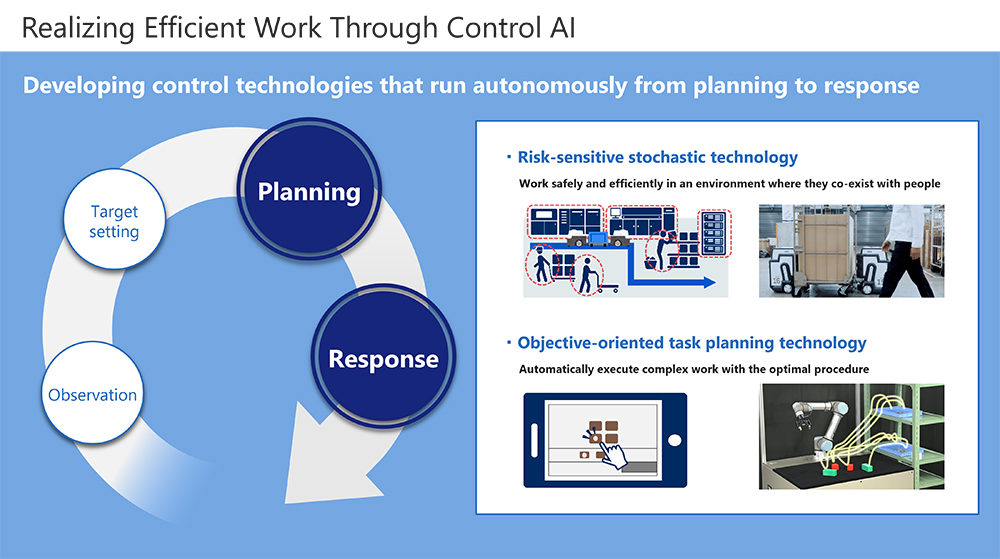
Control Technologies That Think and Move on Their Own Without Exhaustive Instructions
Robotics technologies have made rapid progress, and robots can now move with precision if they are configured with detailed instructions. For that very reason, NEC is now focusing on technologies to reduce the effort required for instructions rather than the robots themselves. While there are approaches that try to realize automatic operation by repeating high data volume based learning, they are unable to rapidly and flexibly adapt when the specifications change in the field. At NEC, we continue to develop practical control technologies that incorporate mathematical modeling and optimization thinking in a data-driven approach.
Primary research technologies
Risk-sensitive stochastic control technology
This is a technology that can enable a high level of both safety and efficiency in robot control. It improves on the shortcomings of past automatic control technologies which would stop and lose efficiency when overly cautious due to safety. It calculates the risk while watching the conditions in real time and can run safely and efficiently even without point-by-point hazard avoidance instructions. We are currently preparing this technology for practical application in warehouse AGVs and the autonomous driving of construction machinery, etc.
Combining Safety and Efficiency in Transport Robots
Risk-Sensitive Stochastic Control Technology

Goal-oriented type of task planning
As long as the target of "place product A on shelf B" is set, this control technology becomes able to avoid obstacles along the way, switch targets if it cannot be reached, and automatically plan other operational steps. It is also able to flexibly adapt to specification changes. Because it automates the teaching work that was previously performed by robot experts over many hours, anyone can easily handle robots. Demonstration testing of robot arm picking and placing is currently underway.