
Global Site
Breadcrumb navigation
High-accuracy and real-time remote control of robots (Adaptive Remote Control)
Featured TechnologiesDecember 6, 2017

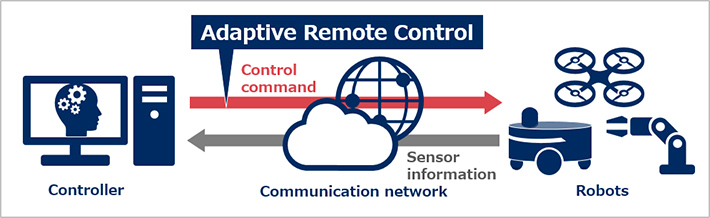
As the world migrates towards IoT (Internet of Things), robots are being controlled remotely via communication networks. Use of wireless IP (Internet Protocol) communications is becoming particularly prevalent in view of connectivity and mobility. However, using wireless IP communications to remotely control robots that require high-accuracy real-time control is subject to communication delays which can prevent sensor information and control commands from arriving in a timely manner. This in turn has hindered the accurate control of robots.
In response to this situation, NEC developed "Adaptive Remote Control," which conducts highly accurate predictions of communication delays stemming from wireless IP communications, and achieves high-accuracy and real-time remote control of robots by estimating the future state of the robots on the basis of the delay prediction.
Adaptive Remote Control has the following two technical characteristics.
(1) Highly accurate predictions of communication delays
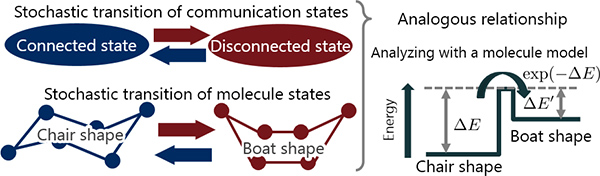
An analogous relationship was discovered between the mechanism that causes delays in a communication network and the mechanism for transition of molecule states. Applying the analytical method used on the transition of molecule states has enabled highly accurate predictions of communication delays.
- (*1)Yasuda, Yoshida: "Prediction of round-trip delay based on the two-state model," IN Study Group, The Institute of Electronics, Information and Communication Engineers, Sept. 2017
(2) Proactive control based on the predictions of communication delays
The above communication delay prediction technology enables predictions regarding the amount of time that has passed to receive feedback from the robots, and the length of delay for the control commands to reach the robots. By using the predictions to accurately estimate the state of the robot at the time the control commands arrive then using the estimates to implement control ahead of the delays, it becomes possible to achieve accurate real-time control even from remote locations where communication delays occur.(*2,3)
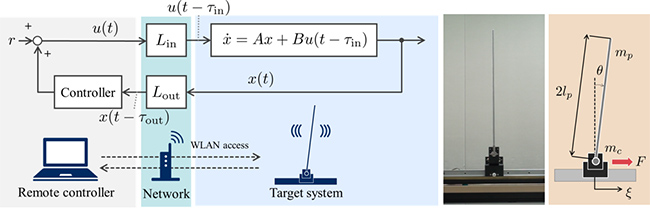
- (*2)H. Yoshida, K. Kumagai, and K. Satoda, "Dynamic State-Predictive Control for a Remote Control System with Large Delay Fluctuation," IEEE ICCE, Las Vegas, Jan. 2018.
- (*3)K. Kumagai, H. Yoshida, and K. Satoda, "Adaptive Remote Control of a Mobile Robot System with Delay Fluctuation," IEEE ICCE, Las Vegas, Jan. 2018.
- Ref.:Collaborative research with Nidec
- ※The information posted on this page is the information at the time of publication.