![]()

On the morning of February 22, 2019, Asteroid Explorer "Hayabusa2" of the Japan Aerospace Exploration Agency (JAXA) successfully touched down on the surface of asteroid Ryugu for the purpose of sample collection. Ryugu's rocky terrain presented a challenge in finding level ground large enough for landing. The touchdown site "L08-E1" chosen by the explorer operation team is only six meters across. Having "Hayabusa2" land on Ryugu that is no more than 900 meters in diameter and approximately 300 million kilometers away from Earth is said to be as difficult as someone aiming to hit a 6-cm wide target located all the way across the other side of the earth. This mission required more than 100 times the accuracy of that stunt.
The success of this extremely challenging mission is attributed to the autonomous control capability that enabled "Hayabusa2" to perform the touchdown operation while assessing its own status without any commands from Earth. The spacecraft's "six eyes of science" also played a significant role in the successful execution of this mission.
Starting with Japan's first artificial satellite "Osumi" that was launched in 1970, NEC has developed and manufactured 75 spacecrafts. Among them is "Hayabusa2". Under the leadership of JAXA, NEC designed, assembled, tested, and integrated the overall system of "Hayabusa2", and contributed key technologies to the mission.
The "six eyes of science" helped accomplish this mission, and the role of each of them is explained here.
Written by Shinya Matsuura on March 27, 2019
©JAXA

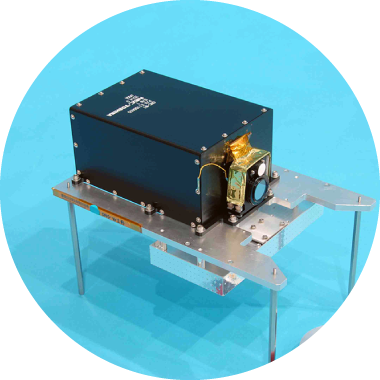
The optical navigation camera (ONC) serves as the eye of "Hayabusa2" looking at Ryugu. The ultra wide angle camera has a 65 degree angle of view, which is equivalent to a focal length of nearly 28 mm for a full size digital single-lens reflex camera. "Hayabusa2" has two ONCs: one at its bottom (ONC-W1) and one on its side (ONC-W2). The main role is played by ONC-W1. During the touchdown operation, ONC-W1 continues to capture images of Ryugu in its entirety from the time "Hayabusa2" is in its home position at an altitude of 20 kilometers, guiding the spacecraft safely and precisely to the target site.
ONC-W2 is used when "Hayabusa2" moves around from the front of Ryugu to its side. The camera captures images of the terrain of the asteroid where the sunlight shines obliquely casting long shadows, to examine the unevenness of the surface of Ryugu.
©JAXA


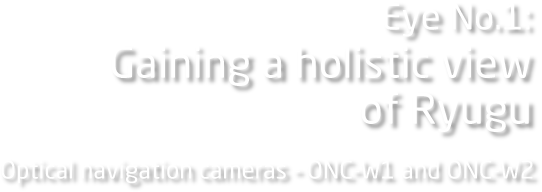
Simply put, ONC-T is an "ONC with a telephoto lens". Its ultra telephoto lens has a 6.3 degree angle of view, which is equivalent to a focal length of nearly 400 mm for a full size digital single-lens reflex camera. Moreover, its eight replaceable built-in filters enable this camera to examine the "colors" of minerals found on the surface of Ryugu. In contrast with ONC-W, which is designed to observe Ryugu from a broad perspective, ONC-T is meant to study enlarged images of the asteroid. Of the images of the Ryugu surface captured by "Hayabusa2", the ones in which the most minute objects can be distinguished were taken by ONC-T. As indicated by its name "optical navigation camera", ONC-T/W was used for optical navigation to navigate "Hayabusa2" precisely to the extremely tiny Ryugu during its flight from Earth to the asteroid.
©JAXA


Ryugu is a carbonaceous asteroid classified as the C type. The C-type asteroids are known to contain hydrous minerals that have water molecules trapped in their crystal structure. It is likely that these bodies of water were trapped in the minerals when the solar system was formed. There is a theory that Earth is a watery planet because a large number of water-containing asteroids fell on Earth in the ancient times. Investigating hydrous minerals can give us clues as to the water on Earth and even the origin of life. Using near-infrared light, NIRS3 examines the distribution of hydrous minerals on the surface of Ryugu, as well as the percentage of water molecules contained in these minerals.
* NIRS3 was developed by MEISEI ELECTRIC CO., LTD
©JAXA
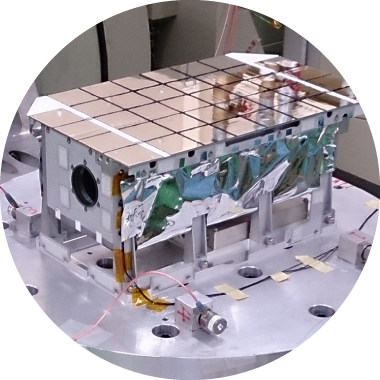
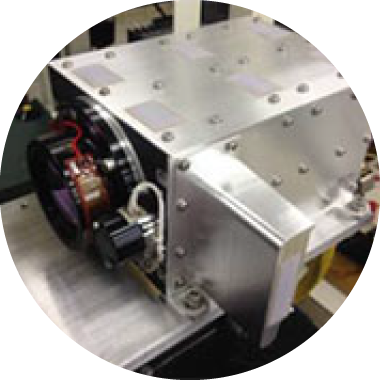
TIR is a "star thermograph" designed to investigate the temperature distribution on the surface of Ryugu. The temperature on the dayside surface of Ryugu rises as sunlight shines on it. Studying how the temperature rises lets us understand the internal structure of Ryugu. Understanding the internal structure makes it possible to infer how Ryugu was formed and how it came to look the way it does now. How the temperature rises reveals the particle sizes of the minerals on the surface.
When "Hayabusa2" approaches a high-temperature area, reflected heat can overheat its body. To ensure safe touchdown, therefore, TIR finds out in advance how high the temperature can get in each of the various parts of the Ryugu surface.
©JAXA
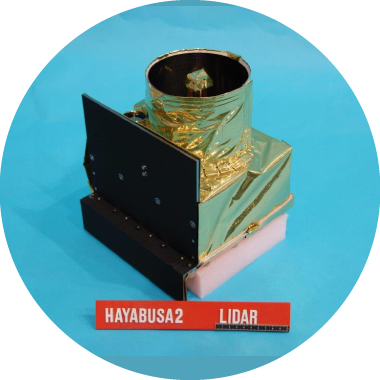
In the operation of touchdown on Ryugu, the information about the current distance from the asteroid surface is crucial. LIDAR emits laser beam pulses and detects reflected light from the surface of Ryugu. Its sensor measures the distance based on the time difference between beam emission and reflected light detection. In the touchdown operation, LIDAR is in charge of distance measurement from an altitude of 20 kilometers to an altitude of 45 meters*. It uses "YAG" laser that is generated when an yttrium aluminum garnet crystal oscillates. Also, a method called "passive Q switching" that utilizes the physical property of a crystal is adopted to control laser oscillation so that the laser is emitted at the desired timing, consequently making LIDAR lighter.
* In the touchdown operation for this mission, LIDAR was in charge of distance measurement up to an altitude of about 28 meters.

©JAXA
As the surface of Ryugu gets close, LRF-S1 takes over the distance measurement operation from LIDAR, conducting distance measurements for the rest of the descending until the final touchdown. It takes over the distance measurement operation from LIDAR at an altitude of 45 meters*. The biggest difference between the two is that, while LIDAR emits only one laser beam, LRF-S1 emits four. By emitting laser beams down in four oblique directions, LRF calculates the distance and, based on the obtained distance, the slope of the area directly below it. This capability is required because when "Hayabusa2" touches down, it needs to land its sample collecting mechanism at right angle to the asteroid surface. On the February 22 touchdown, though, the slope of the touchdown site "L08-E1" had been measured in advance and "Hayabusa2" successfully touched down by changing its posture according to preset commands without relying on this slope measurement capability.
LRF-S2 emits a laser to constantly monitor any changes in the shape of the tip on the sample collecting mechanism. The monitoring results from LRF-S2 are used to determine the timing for firing the bullets into the surface of Ryugu and for the ascent of “Hayabusa2” from the asteroid.
* In the touchdown operation for this mission, LRF-S1 took over from an altitude of about 28 meters.